In an attempt to make use of the experience gained in the 1960’s designing the inertial navigator for the ‘Blue Steel' air-to-surface missile the Company embarked on the development of a general-purpose instrument for aircraft navigation, and an experimental stable platform, E5 was built. This project was not completed, as it was realised that the platform was likely to be too bulky for many applications, and improvements in technique appeared to offer scope for a reduction in size. A project to develop a new platform was commenced in the Company Research Laboratory, FARL, where fortuitously the majority of the small team of engineers had been in the Inertial Navigation Division including the Chief Engineer 'Dick' Collinson and the Chief Designer 'Staff' Ellis. FARL produced the E3 stable platform, using a novel gimbal system which permitted a very compact construction. A trial of this platform was madse in early 1963 at Cranfield with the E3 Platform mounted under the canopy of a Gloster Javaelin. This design entered production for the Hawker Siddeley Aviation HS801 'Nimrod' maritime strike and reconnaissance aircraft and between 1964 and 1970 over 100 platforms were delivered.
However a further development of the E-3 platform, the E-3R which permitted a wider range of manoeuvre, was specified for the BAC/Breguet 'Jaguar' fighter, and entered service in 1970 rapidly becoming an industry standard. The E3-R had a fourth gimbal and incorporated continuous rotation of the two vertical gyros and horizontal accelerometers to achieve 'rotaional averaging' giving greatly increased accuracy.
The Jaguar Navigation and Weapon Aiming Sub-System NAVWASS comprised the MCS920M central digital computer, E3R inertial platform, projected map display and horizontal situation indicator together with the necessary power supply, electronic, interface and control units.
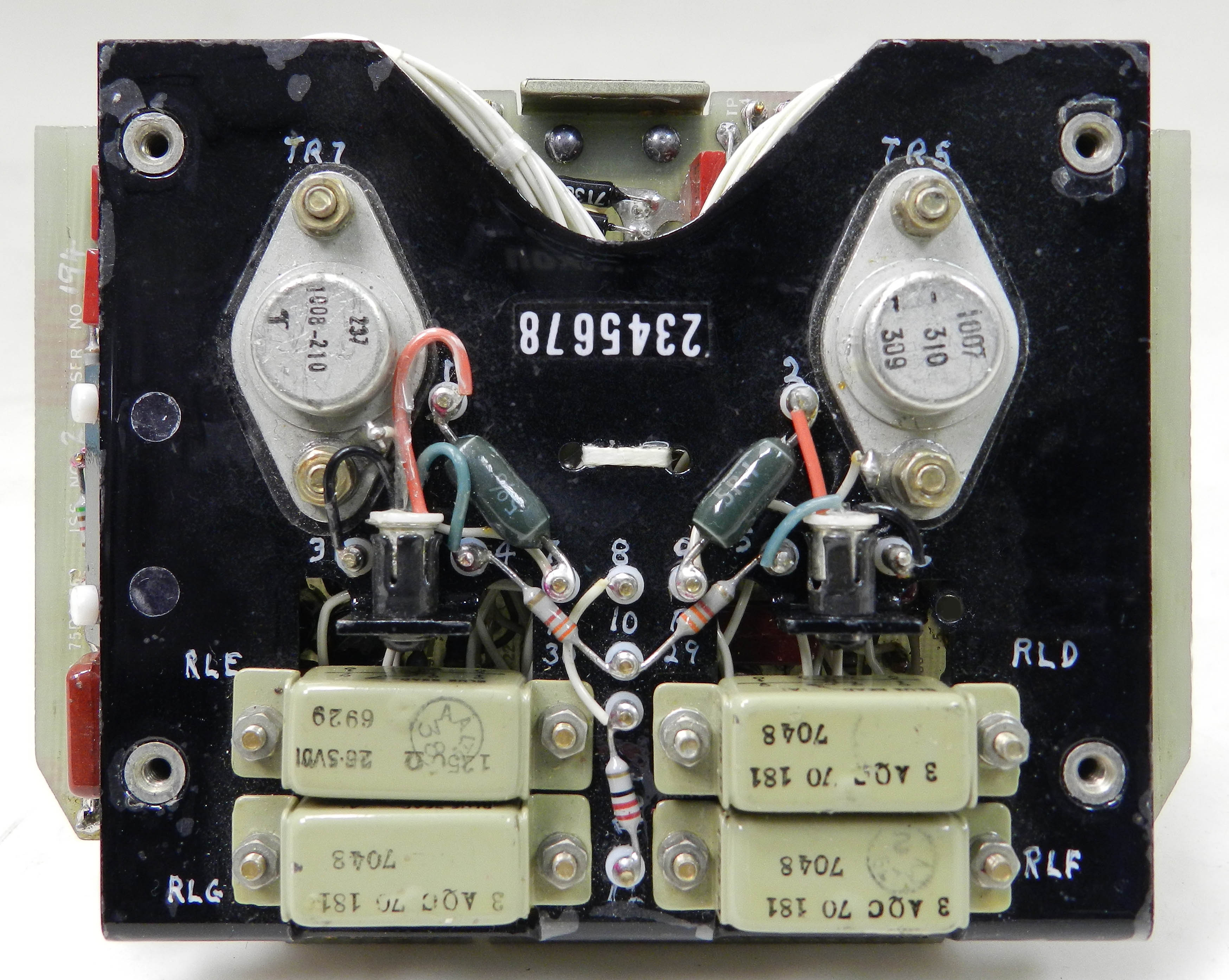
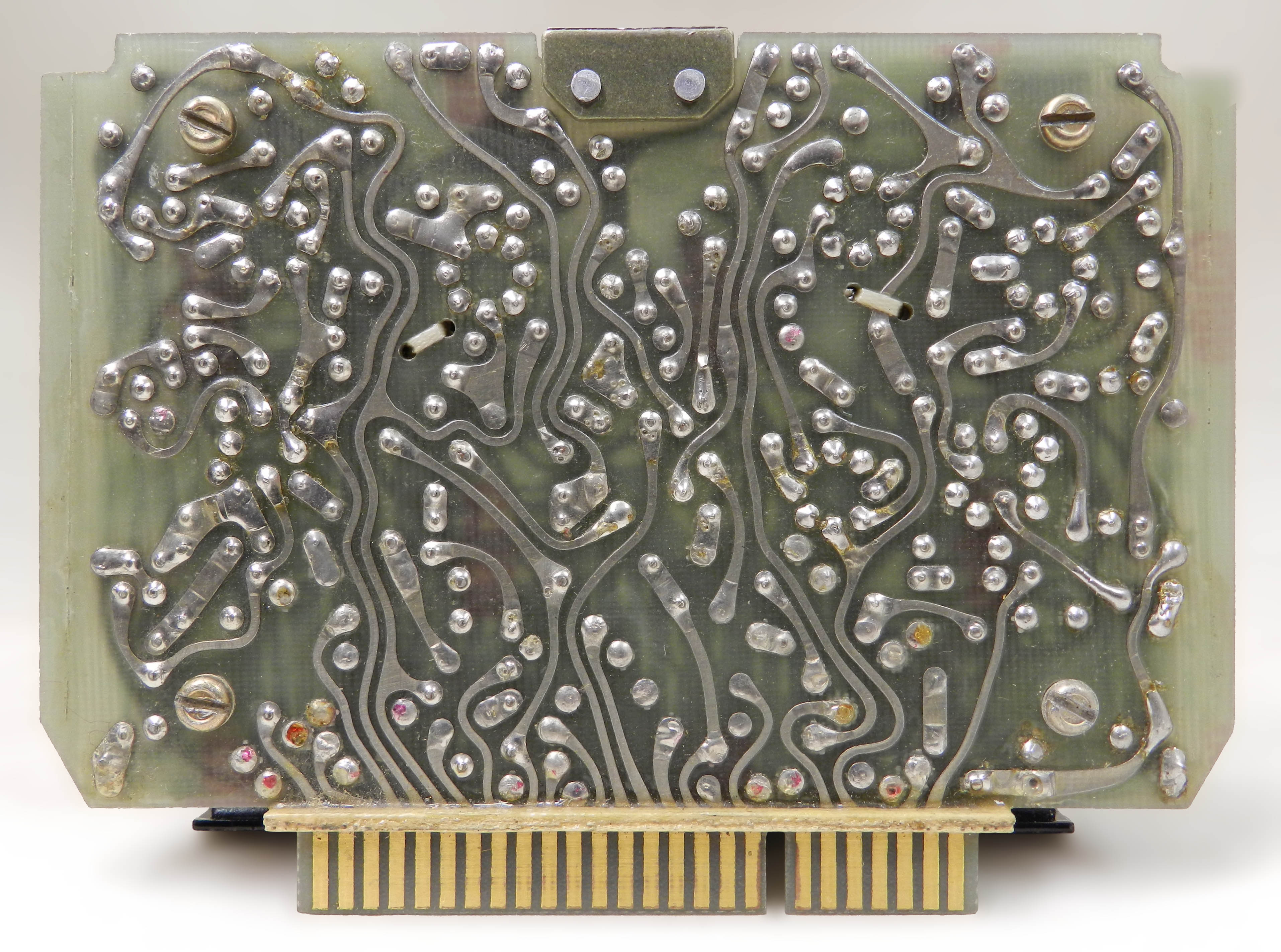
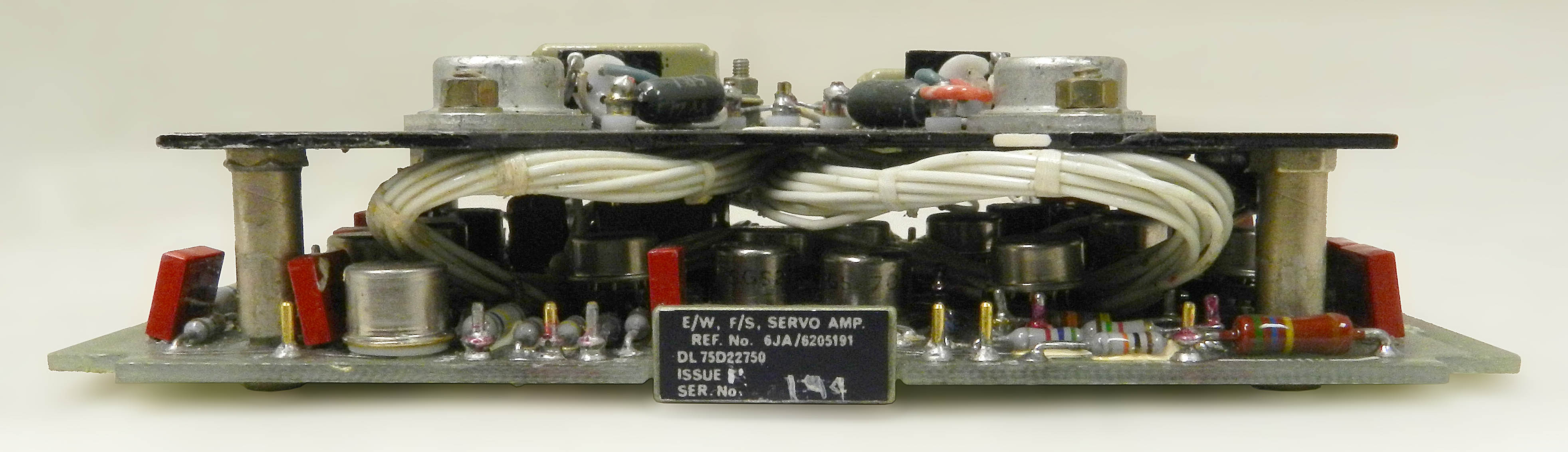
The main unit of the inertial subsystem is the platform assembly which contains a stabilized inertial platform or stable element, the basic attitude reference for the system. The chief function of the platform is to provide a means of accurately locating the gyros and accelerometers and to maintain their orientation fixed to the local vertical and to true north regardless of anv aircraft motion. The electronic control amplifier contains the electronic amplifiers and special excitation sources required for alignment and operation of the inertial platform. These include the gimbal servo amplifiers and the gyro spin motor power supply.