A rate gyro is a type of gyroscope, which rather than indicating direction, indicates the rate of change of angle with time. The gyro has only one gimbal ring, with consequently only two planes of freedom and is used to measure the rate of angular movement. Rate Gyros output a voltage that is proportional to the rate of turn about its sensitive axis.
The original concept of this Rate Gyro was a design by Siemens dating from the late 1930s used in their K12 Autopilot. The concept was developed further in Germany during WWII where it formed part of the rudder control system on the Henschel Hs 129 and in the ‘V2’ rocket weapon. After the War the design was brought to RAE Farnborough eventually being offered to industry, By 1953 Elliott Bros had developed the autostabiliser which was according to FLIGHT Magazine of 1953 necessary to correct the ‘snaking’ activity of certain high speed aircraft. This gyro was fitted near to the c of g of the aircraft and operated a remote actuator unit for the rudder servo tab via a control box. The design was further developed into the Type ‘B’ Autopilot.
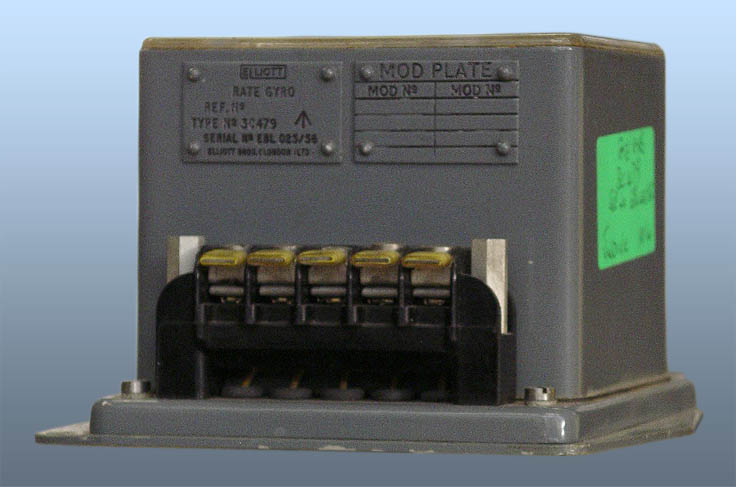
Each Rate Gyroscope consists of a 1.5" hysteresis gyro motor mounted in a single gimbal to give a precessional torque which is proportional to the rate of instrument rotation about the sensitive axis. A multi-coil assembly is mounted on an arm from the gimbal ring, so positioned that the windings move axially in an annular permanent magnet when the gyro precesses. A second arm carries a fine wire pick-off making contact with a fixed winding which is fed from a 28VDC supply and can be set for correct zeroing of the instrument. The voltage between the centre-tap of the DC supply and the pick-offs fed to one of the coils so that interaction of the magnetic fields opposes the precessional torque; thus the gyro precesses against an "electrical spring”. Other moving coils (the gyro shown has three coils but some models only have two) can be used for transient velocity damping or for enforcing an artificial precession, or can be short-circuited for electromagnetic damping.
The voltage between the pick-off and the supply centre-tap is proportional to the magnitude and direction of the precessional torque, so it is also used as the output signal. If a large capacitor is wired between the pick-off and the spring coil the spring still resists precession, but the gimbal does not return to its "neutral" position when the precessional torque ceases With this treatment, the output signal from the pick-off is proportional to the integrated rate of rotation.
The RAE design was modified by Don Kierley of Elliott Bros but was made in Flight Controls Division not Gyro Division. Variants of the gyro were fitted to Elliotts' Flight Control System for the Jindivik in the late 1940s and subsequently to the Lightning (the Type "B") and the FIAT "Flying Bedstead" and although it was proposed for Concorde it was not actually used.